头图来源:维他动力
8 月 8 日下午,北京亦庄的世界机器人大会A区一角,人潮涌动间隙,可以看到一只溜达的「小短腿」。
它一会儿跟在展区人员身后走来走去,一会儿又挤进人群对着镜头歪头卖萌——这是在WAIC后,维他动力(Vbot)又一次把自家「大头」放到真实人流里「溜达」。
如果机器人终究要走进家里的客厅,它应该长什么样?该用什么姿态和你的孩子打招呼?又凭什么让家里人相信,它是一个可以放心的家庭成员?
这家成立刚满半年的公司,带着 3 亿元融资、60 多位从 AI、汽车、动画乃至飞机内饰领域跨界而来的工程师与设计师,试图回答以上问题。他们给出的答案,就是这只昵称为「大头」的智能伴随机器人Vbot。
联合创始人赵哲伦说,他们在试图用「工程科学的思维控制精度,用艺术的思维创造灵魂」 ,为机器人注入「生命力」。
他们想让四足机器人摆脱遥控器,同时回答一个问题:机器人到底能怎样进入真实的家庭生活?

「赛博遛狗」|图片来源:维他动力
跳出「工具论」,重新定义机器人的「存在感」
「大头」不是人们印象中那种带着工业气息、充满机械感的机器狗,也不是过于拟人以至于有些怪异的仿生体,而是一款外观圆润、充满亲和力的四足机器人,定位是「智能伴随机器人」 。
「我们认为它在正式交付之后会是你的小跟班、小跟拍、小跟护。」 赵哲伦这样描述产品的核心体验:它可以跟随家庭的每一个成员出行,帮着拿包;利用AI能力,成为比家人更懂抓拍时机的摄影师;甚至可以在你无暇他顾时,照看老人和孩子 。
「大头」表演了一段跳舞|视频来源:极客公园
这听起来像是一个不错的家庭伙伴,但一个问题是:为什么是现在?为什么是四足形态?毕竟,在过去十多年里,至少有三代四足机器人问世,但它们似乎从未真正走出实验室,进入大众的视野 。
维他动力创始人余轶南(前地平线智能驾驶总裁,自 2015 年起主导地平线智能驾驶和智能座舱技术研发与落地)的看法是,「过去的产品为什么不work?核心就是几点:第一是价值交付,第二是成本,第三点是非常重要的,面向消费者的售后维护。」 他提到,过去的机器人成本高达几十万,且在安全性、可靠性上难以保证,本质上是技术发展还未到那个阶段 。
而今天,情况发生了质的改变。维他动力联合创始人赵哲伦(前理想汽车智能驾驶产品总监,负责理想 ONE 与 L 系列车型智能驾驶产品的定义与交付)将其归功于一个「盟友」——智能汽车产业。「整个智能驾驶,它确实是很好地开拓了整个机器人发展的前提。」
他解释道,智能汽车的快速发展,使得无论是算力芯片、控制器还是电机,其成本在中国被大幅优化,并且品质极高,这为当今的机器人制造提供了绝佳的基础 。
有了「造得起」的前提,下一个问题便是「如何设计」。
维他动力从一开始就希望跳出传统机器人设计的窠臼。赵哲伦分享了他们最初的产品定义思考:在一个矩阵的两轴上,一条是机器人与人的关系,从工业、冷峻到友善,再到可能过于「低幼化」的玩具感;另一条则是它的行动能力,从桌面级、室内轮式,到能够户外行走但无法上下台阶,再到真正的全地形能力 。
「我们最早的时候其实希望这个机器人尽可能小,但我发现要想基础地完成跟人一样走,人能到哪它能到哪,全地形能力,腿的长度至少得是现在这个长度。」
最终,他们将Vbot定义在「友善」与「全地形能力」的交点上:它要有足够强的运动能力,但外观上又不能带有攻击性,而是友善、可爱,同时又不失质感,不会让人觉得是个玩具 。
为此,团队引入了「迪特-拉姆斯式简约设计」,遵循「Less, but Better」的核心理念 。他们的首席工业设计师曾有十几年在美国设计商务舱内饰的经验,为Vbot带来审美上的质感 。赵哲伦总结了四个设计原则:
- 黄金比例:无论是大小腿的比例,还是身体与头部的对比,都经过精心计算 。
- 圆润倒角:整个机身几乎看不到锐角,创造了与人更和谐的关系 。
- 高级质感:样机的腿部甚至用到了与Apple Watch同款的材料,以提升整体品质感 。
- 锐利切割:在需要的地方采用锋利的切割线条,增加设计感,但触感依然保持圆润 。

「大头」在自己下楼梯|图片来源:维他动力
最终呈现的Vbot,在WRC现场的一众四足机器人中,确实显得有点不一样的「萌」。
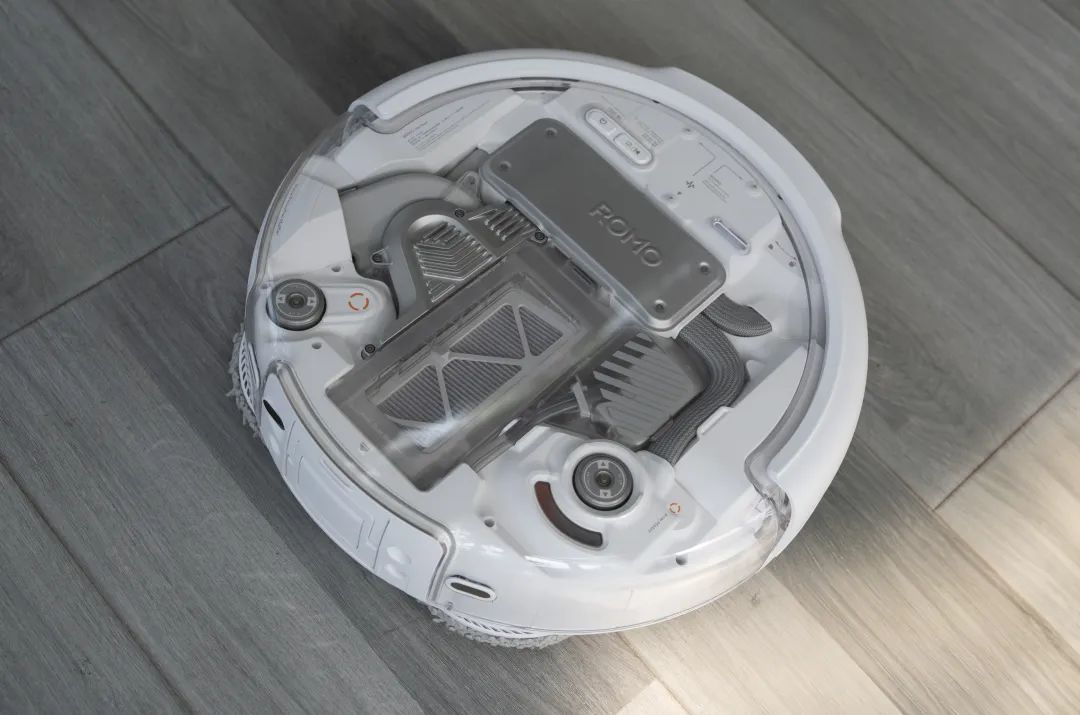
拆解「大头」:一只四足机器人的大脑、算力与「心脏」
如果说设计哲学赋予了Vbot亲和的「皮囊」,那么其内在的技术架构则是它拥有「灵魂」的基石。维他动力从一开始就意识到,要打造一个真正自主的机器人,必须摒弃传统的路径。
这其中核心之一在于对「算力」的理解和应用。余轶南指出,今天的智能汽车,特别是高阶智驾,往往需要在车身布满多达12个摄像头来覆盖长焦和广角,以感知周围环境 。虽然总算力很高,但分配到每个摄像头上的算力其实非常有限 。
Vbot则走了一条更精简、更高效的路。「人其实通过两个眼睛、两个摄像头就能覆盖他基本移动的需求。」 余轶南解释道。
Vbot采用了拟人的可运动双目摄像头设计,就像人可以通过转动头部来扩大视野一样,这对摄像头可以灵活转动,使其水平视场角从固定的150度大幅提升至约230度,垂直视场角也从80度扩展到125度 。
这种设计的精妙之处在于,它不仅降低了对传感器数量的依赖和硬件成本,更带来了一个高效的结果:单位像素可用算力(TOPS/MPixel)远超主流智能汽车,约是其3到8倍 。
更高的「算力密度」意味着Vbot有能力在端侧运行更大规模、更复杂的AI模型,这是其实现高级智能的关键前提。
为了应对真实世界中复杂的异形障碍物和暗光环境,Vbot还额外配备了一个机器人专用的360°激光雷达,确保在全场景下都具备可靠的避障能力 。
强大的感知能力需要一个同样强大的「大脑」来处理。Vbot采用了双系统设计:
智能本体域负责感知—决策—规划—动作,运行于与地瓜机器人联合的S100P芯片(最高128TOPS)——这是机器人的「运动中枢」;
智能交互域负责显示、语音、光效与通信,运行与头部X5芯片,实现高效低功耗的人机交互——这是机器人的「社交中枢」。
这种高度集成的中央计算架构 带来了另一个优势:节省空间。赵哲伦说:「过去拆开一个四足机器人,肚子里要放好多块板子……今天由于我们高度集成,身体里有更大的空间可以来放电池包。」
这直接关系到机器人的「续航」这一核心痛点。传统同级别的四足机器人电池容量普遍在400Wh左右,续航仅一到两个小时。而Vbot凭借优化的内部结构,电量达到了600Wh以上,较行业上限提升了38% 。
不仅如此,维他动力还在与电池巨头亿纬锂能(EVE Energy)合作,联合开发更高密度的动力电池,有望将电量进一步提升,实现超过6小时的户外续航,完全满足单日出行的需求 。
然而,Vbot不仅要「看得见」、「动得久」,更要「听得懂」、「会思考」。为此,团队为它设计了一套全新的Agent架构 。
余轶南将它与我们熟悉的PC和手机交互做了对比:我们与电脑的交互距离很近,可以用键盘鼠标;与手机的交互距离更近,可以直接触控 。但与机器人的交互,距离往往在几米开外,掏出手机来控制,体验其实非常不便 。
Vbot的Agent架构,就是想想要抛开遥控器和预设的图形界面 。赵哲伦解释道,有无遥控器的核心区别在于,对环境的感知由谁来承担。「在有遥控器的情况下,是控制者来承担对环境的感知」。而没有遥控器,这件事就需要机器人本身去实现。
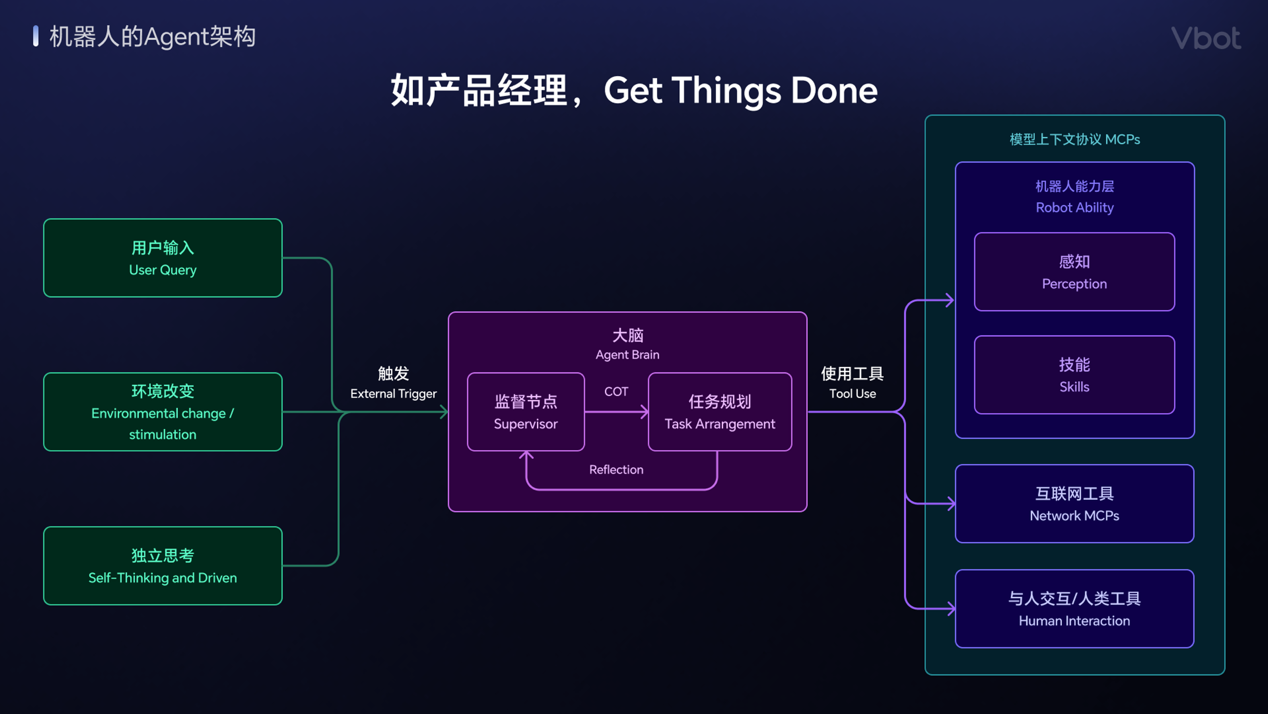
机器人的Agent架构|图片来源:维他动力
它的核心是视觉—语言—行动(V-L-A)模型 ,统一了「看懂—听懂—做对—解释清楚」的全链路 。用户输入指令后,Agent大脑会利用思维链(CoT)和反思(Reflection)等机制,像产品经理一样理解意图、拆解任务,然后调度各种工具来完成 。
这些工具不仅包括机器人自身的感知和技能,还包括可扩展的物理世界工具(如通过多功能背板连接机械臂或运动相机)和互联网服务 。
「它可以通过各种各样的连接工具实现机器人跟世界的互动。」余轶南举例说,Vbot可以拖着人玩滑板,也可以装上一个特制设备,在网球场里自动捡网球 。这种可扩展的「任务工具链」,为用户提供了丰富的应用生态 。
注入「生命力」:用艺术的思维来创造灵魂
「我们是要打造有生命力的机器人。」赵哲伦在发布会上强调,「工程科学的思维可以控制精度……但我们认为必须得用艺术的思维来创造灵魂。」
这句话点明了维他动力不一样的追求:让机器人拥有「生命感」。他们认为,过去很多机器人交互方式存在局限,要么被预设的图形界面限制,要么只依赖语音而容易产生误解 。
团队从「LOVOT之父」林要那本为《温暖的科技》的书中获得启发。书中提到,人与人之间的信息传递,55%依赖肢体语言,38%是语气,而纯粹的语言内容只占7% 。这让他们意识到,要让交互变得自然、温暖,就必须让机器人拥有丰富的表达能力。
「机器人应该怎么样来去表达自己的情绪?不管是开心也好还是害怕也好。」Vbot给出的答案是:全模态交互 。它不仅有屏幕上的表情,更有肢体、扬声器和指示灯的协同表达 。
为了让这些表达生动可信,维他动力做了一件在机器人行业相对少见的事——聘请动画师。赵哲伦介绍,他们将迪士尼动画的十二法则,如节奏感(Timing)、夸张(Exaggeration)和吸引力(Appeal),融入到机器人的动作设计中 。
例如,通过控制动作的速度变化(加速度),来表达惊讶或喜悦的情绪;通过夸张的躲避动作,来告诉用户它「害怕」前方的沟壑,无法通行;通过一些小动作展现其鲜明的个性,比如在思考时做出歪头的姿态 。这些设计让Vbot不再是一个执行命令的机器,而是一个能够传递情绪、有「性格」的伙伴。
除了情感表达,Vbot也拥有「长期记忆」。赵哲伦向极客公园谈到,他们的记忆系统分为三部分:空间、关系和信息。
- 空间记忆:机器人需要记住家庭或办公室的环境布局,能听懂「去爸爸的房间」这样的指令。
- 关系记忆:通过声纹和人脸识别,它能分清家庭成员,知道谁是谁。
- 信息记忆:这是更深层次的交互记忆,让机器人能够理解并记住用户的偏好和习惯。
这种对「生命感」的追求,背后是一定的技术支撑和清晰的商业规划。维他动力成立仅半年,已先后完成种子轮和天使轮融资,累计融资规模达3亿元人民币,天使轮由达晨创投领投,联想创投、渶策资本等跟投 ,资金也将聚焦于首款智能伴随机器人的规模化量产 。
为此,他们组建了一个覆盖电池、电机、算法、数据基建等全栈软硬件的60多人研发团队 ,并与京东(新零售)、火山引擎(大模型算力)、地瓜机器人(端侧算力)、禾赛科技(传感器)和亿纬锂能(电池)等行业巨头达成了深度合作 。
一条清晰的路线图已经铺开:9月启动制造工厂,10月到12月开启早鸟内测,年底正式上市,并在明年1月的CES展会上开启海外众测 。他们也有一个更长久甚至宏大的目标:5年内,让机器人大规模进入家庭和办公场所;10到20年,成为全球前三的智能机器人公司 。
当被问及为何不做更「酷」的人形机器人时,赵哲伦向极客公园坦言,人形机器人的技术挑战依然巨大,且他们认为第一款家用产品「个子不能比孩子高」,以保证亲和力和安全性。
从智能汽车产业汲取养分,到用「算力密度」重塑硬件架构,再到以「生命感」定义交互体验,维他动力正在走一条此前未被走通的路。他们丢掉了遥控器,因为这迫使机器人必须真正地理解世界。

维他动力创始人|余轶南
余轶南说,「智能手机跟非智能手机最大的区别是没有物理按键,无人驾驶跟辅助驾驶最大的区别是没有方向盘。」 而Vbot正在做的,就是拿掉机器人的「遥控器」,推动其向一个更自主、更智能的方向发展。